Human-Robot Interaction
UI/UX Design • Desktop Application Design
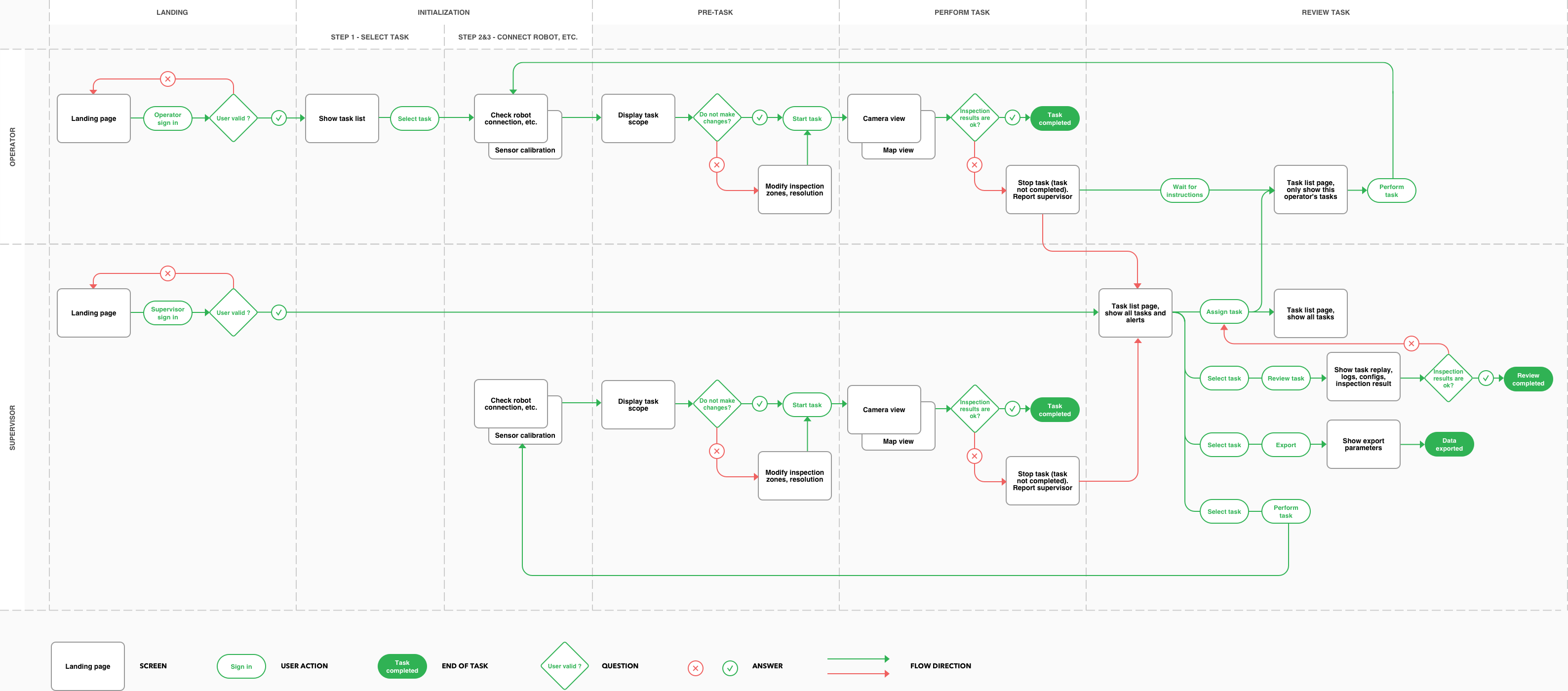
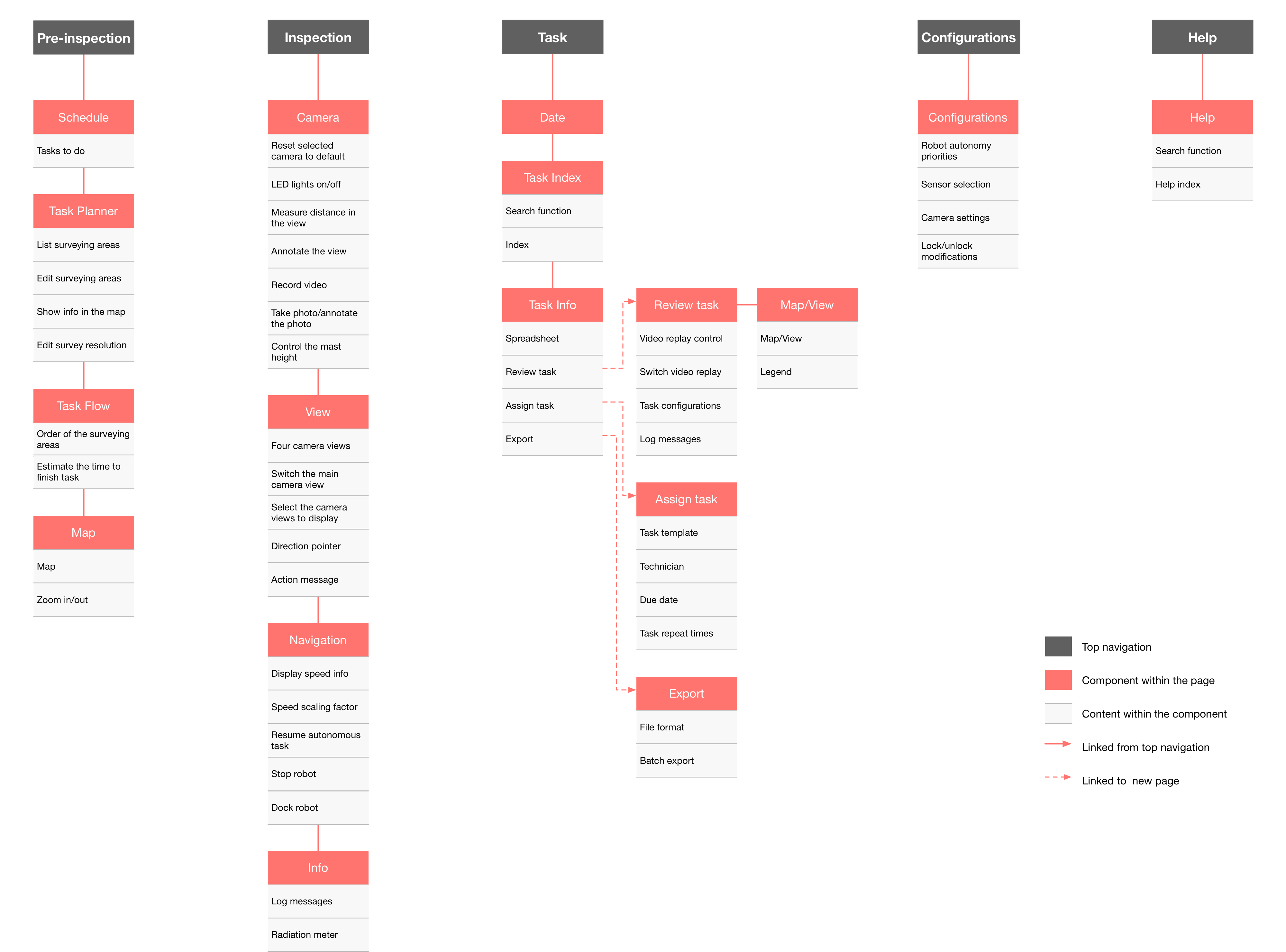
Performing contamination inspection tasks in nuclear environments is dangerous for human beings. Therefore, UT Nuclear Robotics Group wants to improve worker safety by reducing their presence in the high-risk radiation environments while allowing them teleoperate mobile robots to perform contamination inspection tasks. Because the intended users don't have any robot operation experience, and may not have higher education, the requirement is to design an easy-to-use user interface.
“ How to design an easy-to-use robotics interface for people without robot operation experience?”
Project Info
- Client: UT Nuclear Robotics Group
- Date: June - September, 2018
My Role
- Sole Researcher
- Sole UI/UX Designer
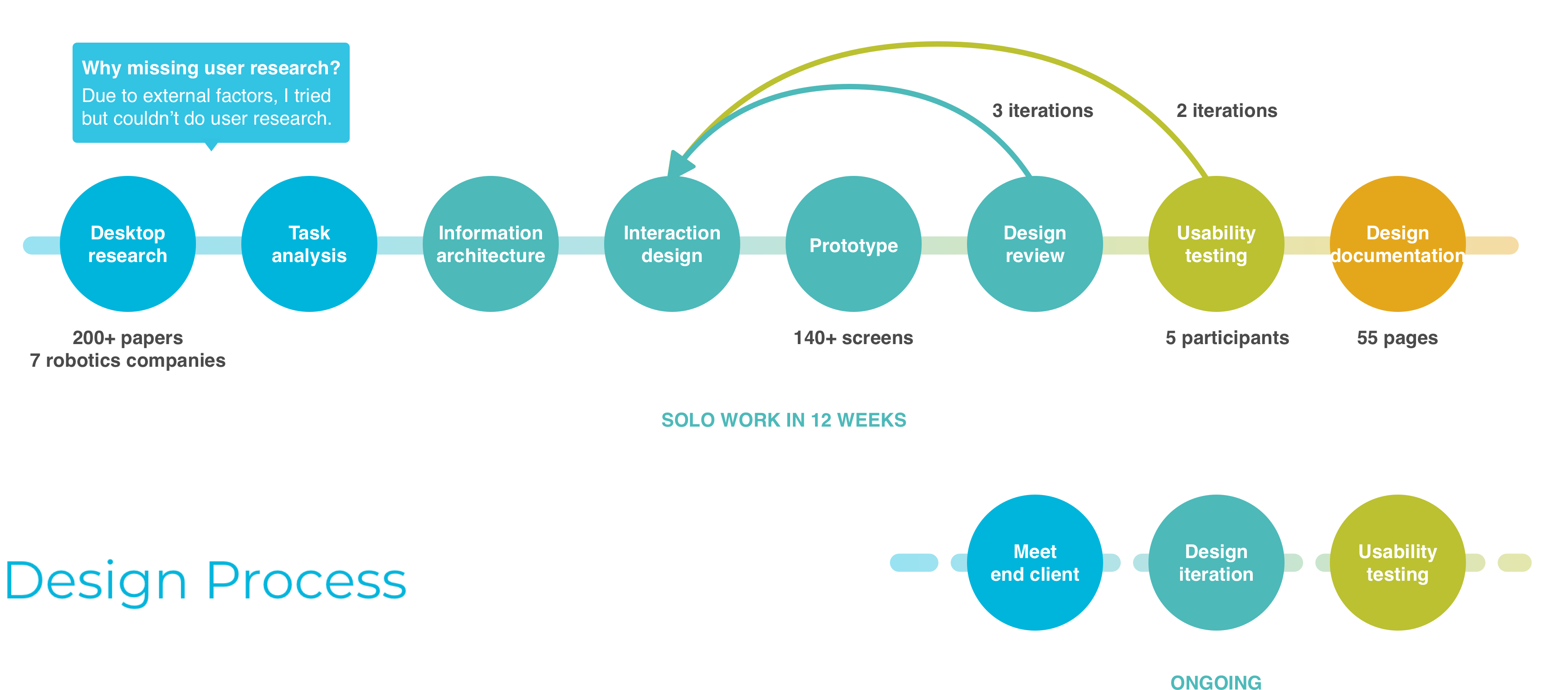
Methods
- Desktop research
- Information architecture
- Interaction design
- Rapid Prototype
- Usability test
Tools
- Sketch
- InVision
- Photoshop
- PowerPoint